Einsatzbereiche
SIL-Tests (Software in the Loop)
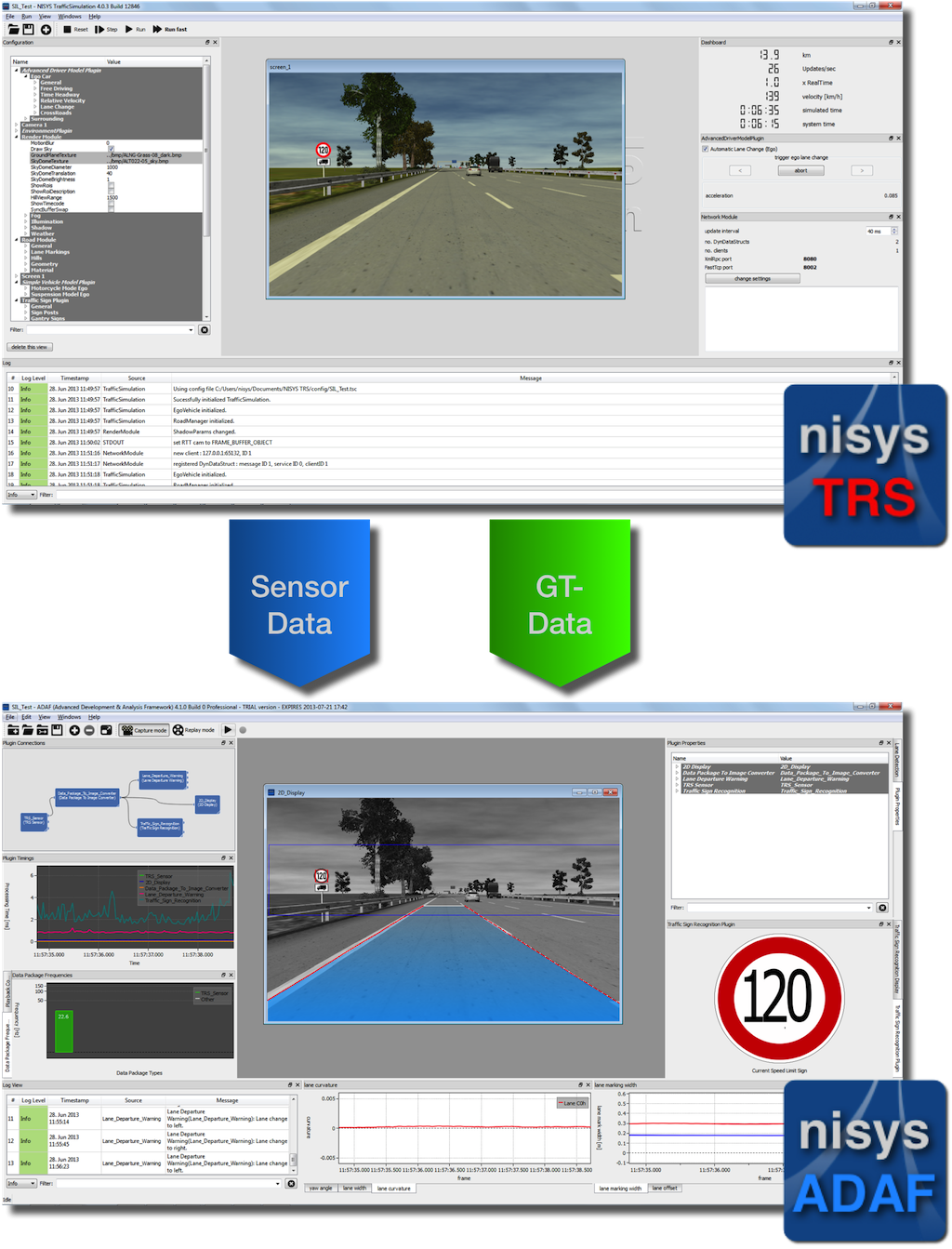
Bei Software in the Loop (SIL) Konfigurationen können Algorithmen direkt auf Sensordaten des TRS getestet werden. Dazu bietet ADAF die Infrastruktur zum Empfangen von Sensor- und Ground-Truth-Daten von TRS, womit die mittels ADAF SDK implementierten Algorithmen getestet werden können.- SIL-Test-Umgebung durch Kopplung von ADAF mit TRS
- Echtzeit-Übertragung von Sensor-Daten in ADAF (z.B. Video)
- Echtzeit-Übertragung von GroundTruth-Daten zu Verifikationszwecken
- ADAF SDK zur Entwicklung und Integration von Algorithmen (z.B. Fahrspurerkennung)
HIL-Tests (Hardware in the Loop)
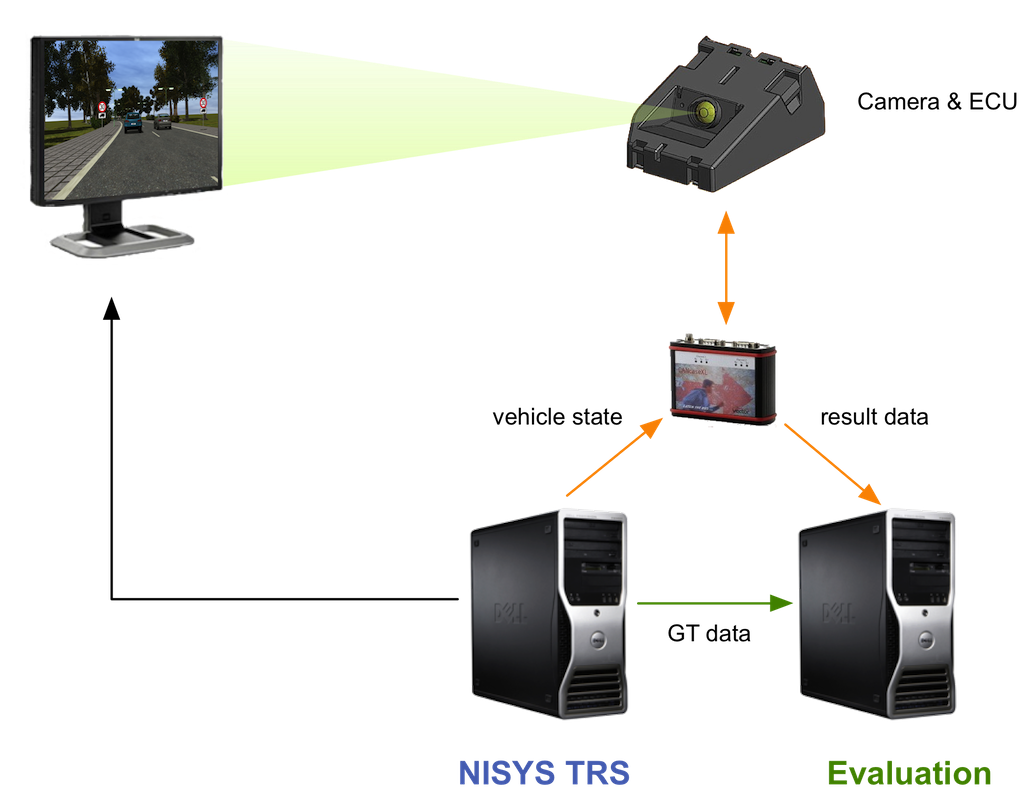
Bei Hardware in the Loop (HIL) Konfiguration werden die zu testende Hardware-Komponenten (z.B. Video-Module) in einem Teststand mit von TRS generierten Sensordaten getestet. Die Ergebnisse der Datenverarbeitungsalgorithmen auf embedded Hardware können online mit Ground-Truth-Daten verglichen werden.- HIL-Test Konfigurationen
- Integration in vorhandene CAN-Infrastruktur
- Online-Zugriff auf Ground-Truth-Daten
- Uneingeschränkte Langzeittests mit randomisierten Szenerien
- Durchlauf definierter Szenarien im Batchmode
Closed-Loop-Tests
Zum Testen von Steuergeräten (z.B. ACC, autonome Fahrzeugsteuerung, etc.) lassen sich auf Basis von TRS-Sensordaten Steuersignale (z.B. in HIL-Testständen) berechnen und in NISYS TrafficSimulation rückkoppeln. Dies ermöglicht eine Closed-Loop-Steuerung der Fahrzeuge.- Rückkopplung von Steuersignalen aus HIL/SIL-Konfigurationen
- Vielfältige Schnittstellen (TCP/IP, CAN)
- Triggern taktischer Manöver (z.B. Spurwechsel, Zielgeschwindikeit, etc.)
- Vollständige Fahrzeugkontrolle (laterale und longitudinale Steuerung)

Driver in the Loop
Insbesondere für verkehrspsychologische Experimente lassen sich Hardwarekomponenten mit TRS verbinden und ermöglichen dadurch eine vollständige Steuerung der Fahrzeuge in TRS durch menschliche Fahrer. Durch Kombination mehrere Simulatoren lassen sich auch komplexere Verkehrssituationen mit realen Fahrern erfassen.- Kopplung von Hardware-Komponenten mit TRS (z.B. Lenkrad via DirectX)
- Kopplung von original Automotive-Komponenten via CAN-Bus
- Freie Konfigurierbarkeit der Darstellung (z.B. Tag, Nacht, PKW, LKW)
- Multi-Screen Setup (z.B. für Rückspiegel)
- Synchronisation mehrerer Fahrstände zur manuellen Steuerung mehrerer Fahrzeuge in einem Szenario
