Areas of application
SIL-Tests (Software in the Loop)
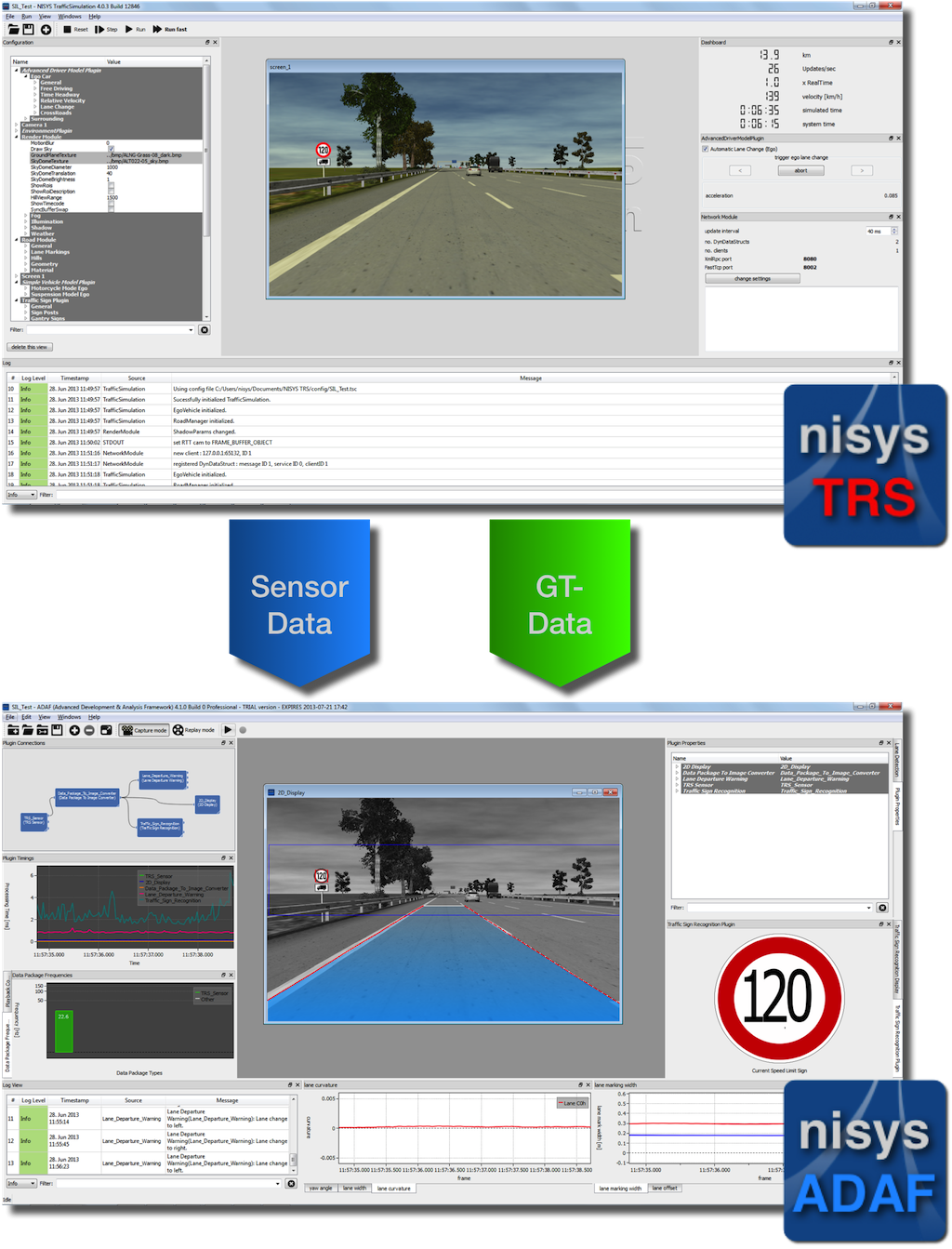
Data processing algorithms can be directly tested on the sensor data of the TRS for software in the loop (SIL) configurations. For this purpose, NISYS ADAF provides infrastructure for the integration of sensor and ground truth data sent by TRS. Data processing algorithms implemented within NISYS ADAF can be thoroughly tested on these data.- SIL test environment by coupling ADAF with TRS
- Real-time integration of sensor data in ADAF (e.g. video)
- Integration of ground truth data for verification purposes
- ADAF SDK as a platform for algorithm implementation (e.g., lane assistant)
HIL-Tests (Hardware in the Loop)
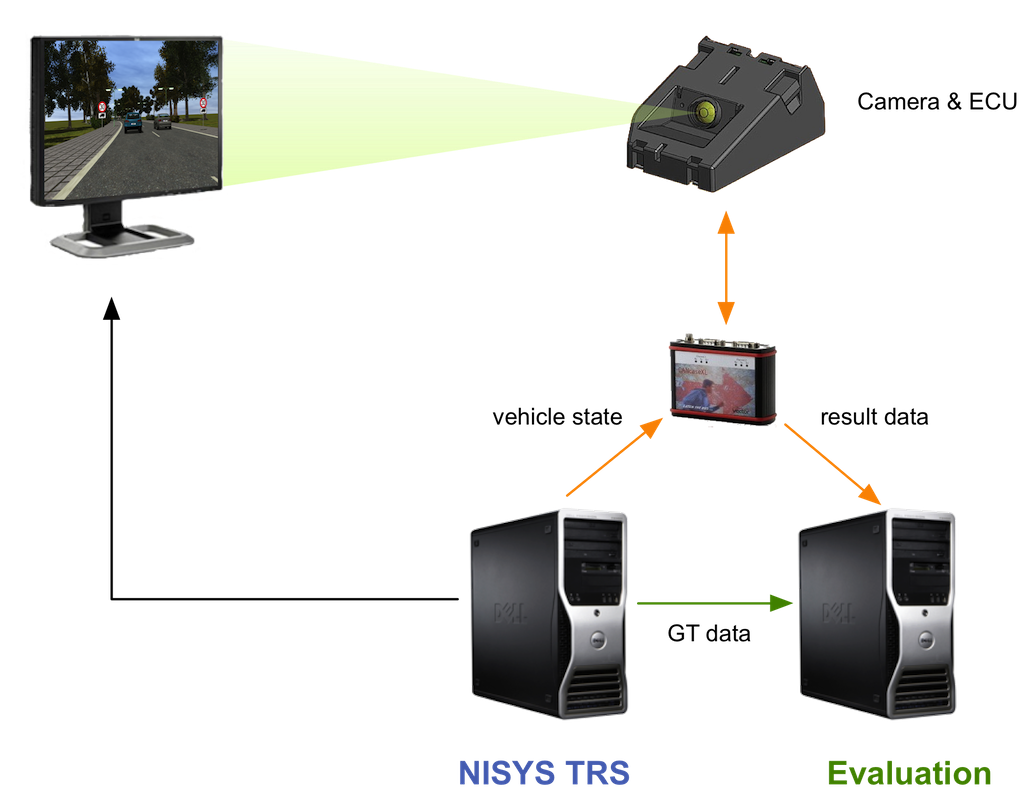
In hardware in the Loop (HIL) configuration, hardware components under test (e.g. video processing modules) are fed with TRS-generated sensor data. The results of the data processing algorithms, executed on the hardware components, can then be compared to ground truth data.- HIL-Test configurations
- Integration into existing CAN-infrastructure
- Online access to ground truth data
- Unlimited long-term tests with randomized scenes
- Batch scenario execution
Closed Loop Tests
Testing of electronic control units (ECUs), e.g., ACC, autonomous vehicle control, can be organized based on sensor data generated online by TRS. Control signals (e.g., for HIL test stands) are fed back into NISYS TRS. This allows closed-loop control of the vehicles.- Feedback of control signals from HIL/SIL configurations
- Multiple interfaces (TCP/IP, CAN)
- Triggering of tactical maneuvers (e.g., lane changes, speed adjustments, etc.)
- Complete vehicle control (lateral and longitudinal control)

Driver in the Loop
For traffic psychological experiments in particular, hardware components can be connected to TRS and thereby give human drivers full control of the vehicles in TRS. Combination of multiple simulators, and thus, multiple drivers can cover more complex traffic situations.- Coupling of hardware components(e.g., a steering wheel) with TRS via DirectX
- Coupling of original automotive components via CAN-Bus
- Full configurability of graphical representation (e.g., time of the day, cars, trucks)
- Multi-screen setup (e.g., rear-view mirror simulation)
- Synchronization of multiple simulators for manual control of several vehicles in a scene
