Automation
Reference projects
Object measurement
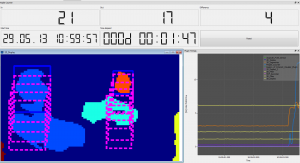
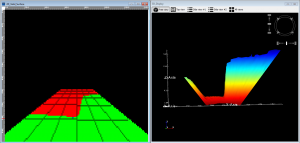
By the means of a time-of-flight 3D camera by IFM, geometrical properties of an object (dimensions, flat surfaces) can be determined. In the case of surface estimation, a simultaneous check of the measurement range ensures that the measurement results are not impaired by interfering obejcts. An adaptive process accounts for variable background surfaces. Processing and visualization is implemented as individual plugins in ADAF.


Presence detection
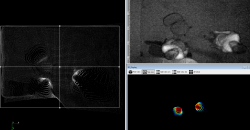
3D data from a TOF-camera by Bluetechnix are employed to detect the human presence within the camera's field of view.
People counter
The number of persons entering and leaving the camera's field of view is determined based on characteristic 3D structures of human individuals. The range data is provided by a TOF camera by Bluetechnix.